Disney Imagineering’s Project Kiwi is a free-walking robot that will make you believe in Groot - Android
The black curtain pulls aside and a character straight out of the movies waves hello. This is not an uncommon occurrence when I’m around Imagineers, but this time is special. The character isn’t a costume, it’s a robot. And, unlike the many animatronic figures you’ve seen in the parks, it’s not stuck in one place. No, this character is walking toward me, attached only by a thin cable used for programming.
The gait is smooth, the arms swing in a lifelike manner and the feet plant realistically. The body sways exactly as you’d expect it to. There’s no other way to say it, it’s ambling. This is Project Kiwi, a small-scale, free-roaming robotic actor — the first of its kind for Disney and a real robotics milestone.
The Holy Grail of themed entertainment has been established for decades now: a fully mobile, bipedal character that matches the appearance, personality and scale of the original. Various non-mobile levels of this vision have been achieved at parks around the world, including the incredibly lifelike Na’Vi Shaman, The A1000 figure that powers characters like Star Wars: Galaxy’s Edge’s Hondo Ohnaka and the smoothly expressive Belle from Beauty and the Beast at Tokyo Disneyland. There have also been some cool mobile experiments like the self-piloting droid “Jake”.
The pint-sized character has accurately rendered textures on its face, hands and feet. It’s dressed in a distressed red flight suit that you may remember from the films. And its eyes are expressive as it looks at me and waves. This is the moment, the one that Disney Imagineers and park goers alike have been waiting decades to realize. This is a real, walkaround character that is at the proper scale, kid scale.
A couple of weeks ago at Walt Disney Imagineering in Southern California, I saw just how close they finally are to making that dream come true. A bipedal platform, developed completely in house over the past three years by WDI researchers and roboticists — dressed up to look like a roughly two and a half foot tall Groot.
Even though the version of Kiwi that I’m looking at is Groot-flavored, it’s important to stress that this is a platform first and foremost, which means that it could take this form when it gets to the parks, or another form entirely. It’s important while developing a character to have a target character that can tell you whether or not you’re hitting an established mark of believability.
Kiwi also is still very much a work in progress. I wouldn’t expect to see this in the wild soon; there is still a lot of work to be done on the way that Kiwi works and interacts with people, and WDI does not have immediate plans to put it in the parks.
But even at this stage it’s an incredible feat of engineering that genuinely radiates that elusive characteristic that Disney always searches for with its figures: presence.
How did we get here?
I was able to speak to the lead on Project Kiwi, R&D Imagineer Principal Scott LaValley, as well as Advanced Development Studio Executive SVP Jon Snoddy, about how the platform came together over the past few years.
“Project KIWI started about three years ago to figure out how we can bring our smaller characters to life at their actual scale in authentic ways,” LaValley says. “It’s an exciting time for bipedal robotics and with an incredible team and our combination of technology, artistry and magic, we are bringing characters to life that could not have happened anywhere but Disney.”
I’ve talked a bit about the unique Imagineering process in my previous pieces on how Disney builds reactive robotics, autonomous stuntbots and even entire lands. Imagineering works a lot like a startup in the way that it comes up with a problem to solve and then goes about pulling in other departments to help it get a solution. There is a remarkably ego-free nature to much of the way that WDI actually finds those solutions, too. They are as likely to find a key component off the shelf as they are to design, develop and patent it in house.
The interconnected nature of Imagineering departments like ride design, show systems, special effects, animatronics department, Tech Studio R&D and Disney Research means that they share solutions across the stack as well.
The guiding thread to all of it, of course, is storytelling. This guiding force exists at all levels of the process, keeping the project moving in the right direction — toward a better way to tell stories and transport guests.

Image Credits: Walt Disney Imagineering R&D Inc.
With Kiwi, the end goal was clear, a character that could walk on its own and interact with park guests. Unfortunately, due to the scale and complexity of the figure and the requirements for interaction and walking, no “off the shelf” platforms would do. The fact is that there are actually only a handful of truly viable bipedal robotics platforms anywhere in the world and the vast majority of them are being created for industrial applications, with a handful of “human-scale” solutions that are designed as marketing set pieces rather than truly autonomous systems.
So to hit that goal, Imagineering turned to R&D and LaValley’s team. LaValley came to Disney from Boston Dynamics, where he worked on the first version of its biped robot Atlas.
The project scope was that they needed a biped robot that was battery powered and could be programmed to handle autonomous interactions with park guests and striped gestures and emotes. The team would take the next three years to build what they needed — much of which was custom for reasons we’ll get into shortly.
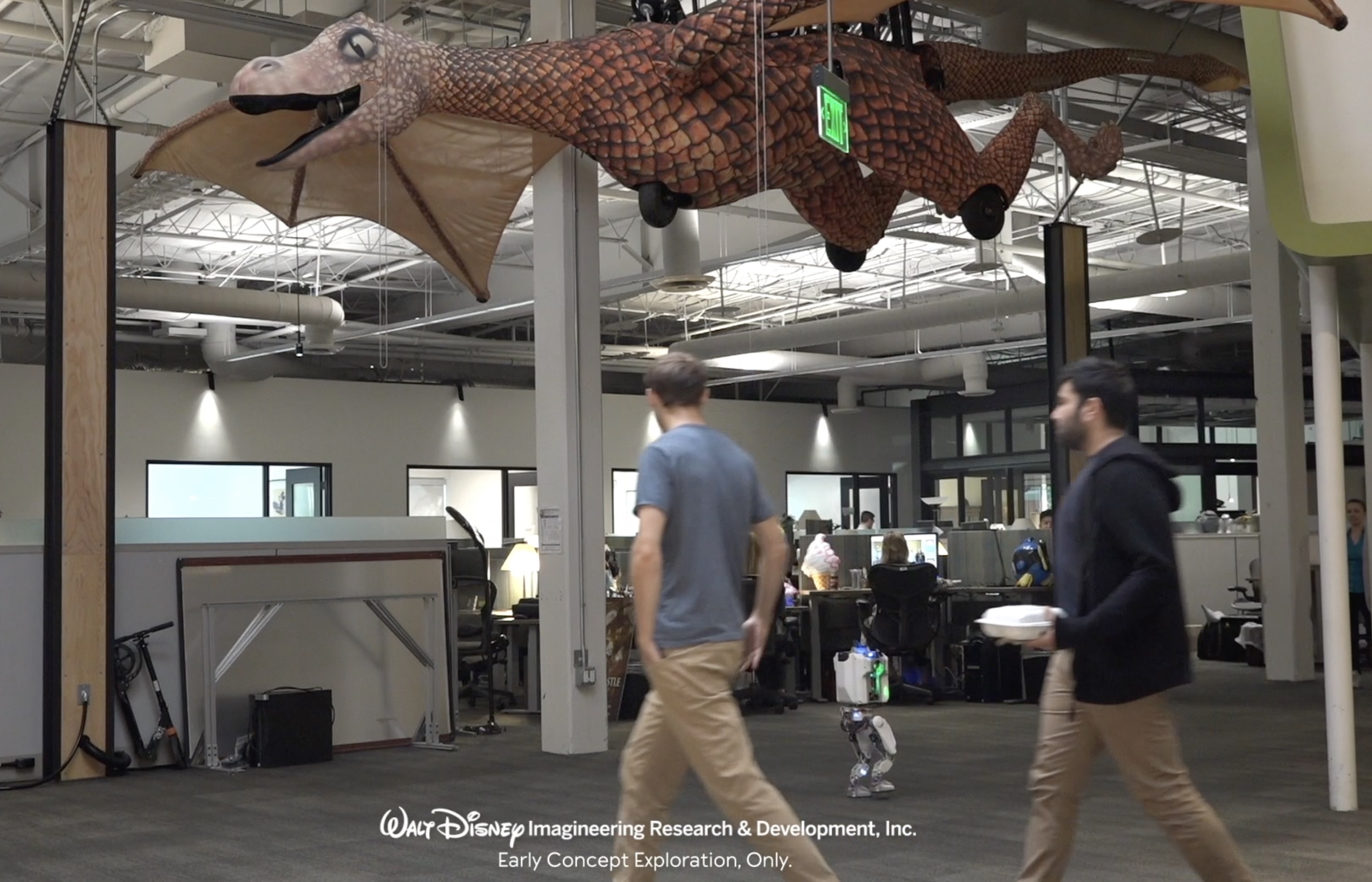
Image Credits: Walt Disney Imagineering R&D Inc.
It’s clear at a glance that Kiwi has no operator inside. The human brain is pretty good at instinctually understanding whether a space is just too small to have a person in it. In order to achieve the small size, the team had to first build a custom skeleton that had room for every motor and actuator Kiwi would need to achieve 50 degrees of freedom, all while keeping it humanoid in shape so that it could be “dressed up” as any number of characters.
First came the frame. Prototypes were built from custom-printed polymer and then eventually custom metal parts using industrial printers. The armatures and segments that they needed to house the critical components were just too complex to mill or cast. The cleverly printed metal skeleton is hollow throughout, allowing a “marrow conduit” for air which rushes through the body cooling the motors and actuators. In the current Kiwi prototype the air comes in through the collar area of the suit, flows throughout the body, propelled by fans embedded in the skeleton and exhausts near the bottom of the unit. Eventually it will use the clothing as a shroud to help air flow out near the feet.
Though there is some audible noise, even in this early state it is very low, allowing audio playing out of a speaker to enable conversation.
As you can see in the exclusive progress video embedded above, the lower sections were built first. Early testing around the office shows the legs and torso sneaking, bouncing, shuffling and strutting through Imagineering. This is probably the only workplace in the world where the bottom half of a torso can tiptoe past your office while you’re eating lunch and it doesn’t even merit a pause between bites.
An enormous amount of completely custom robotics work went into the Kiwi platform. In the demonstration I saw, young Groot had a safety tether and control cable for live programming, but nothing on the rig itself needed support, it was free roaming with on-board battery power that LaValley says hits around the 45 minute mark currently, with more longevity hoped for in the final version. In fact, a next-generation skeleton is already under development that is lighter and more efficient.
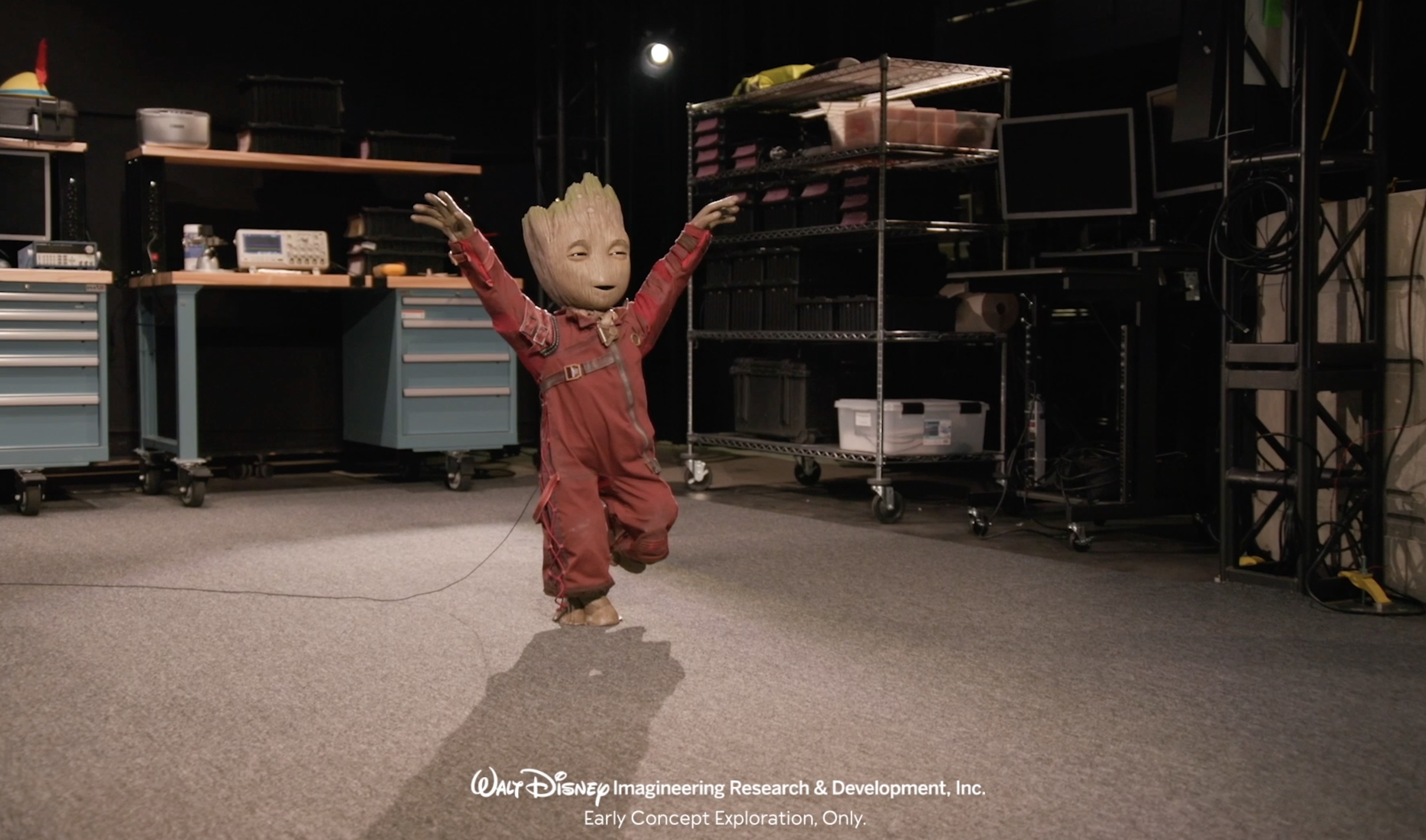
Image Credits: Walt Disney Imagineering R&D Inc. / Walt Disney Imagineering R&D Inc.
The legs use a system that offers a kinetic counter-balance, allowing the force of having to move and plant a foot to be off-set, making motions more power efficient and quicker. Think of a spring-loaded heavy gate that makes it easier for you to swing open — but no springs, and a robotic limb instead of a gate.
The feet plant realistically for the very simple reason that they must actually support the figure. This gives it an additional layer of believability that just doesn’t happen with externally supported characters that “fake” a foot plant. LaValley demonstrated that the figure could easily stay afoot even if it was shoved gently or if a hand was rested on its shoulder. This kind of self-balancing is something that humans do unconsciously and continuously, but it must be built and programmed in to an ambulatory robot.
Many patentable inventions went into this creation. One of them is a clever system of gears that translates energy across joints, allowing them to share motors with one another even across a joint like a knee or wrist. This means fewer components and the ability to keep motor and actuator packages small and compact enough to fit underneath theming.
In order to minimize the amount of wiring throughout Kiwi — since wires are always the biggest points of failure — the team created a set of origami-like circuit boards joined by integrated flex cabling. Think of your standard computer circuit board but sliced into segments and mounted to the exterior of the hollow “bones.” They wrap around the limbs and other body parts, binding the control systems and motors being controlled into a local group that reduces the amount of harnessing that needs to be spread across joints and throughout the structure.
No actuators — the components that decide how to move a limb — that exist had the capabilities that the team needed, so they built them from scratch. At one point, LaValley handed me a ring holding iteration after iteration of a dozen actuator elements. I was holding years’ worth of engineering, experimentation, failure and progress on a simple bit of wire twisted together at the end.
Up next for Project Kiwi is a new set of actuators that can dynamically apply torque plus added sensing capabilities for more stability and reaction to uneven ground or interactions. You can imagine that, as a free-roaming character people will want to take pictures with it and I doubt kids would be able to resist running up for a hug. The skeleton must be able to sense and react quickly and smoothly to those sudden external inputs in order to stay upright and keep looking natural.

Image Credits: Walt Disney Imagineering R&D Inc. / Walt Disney Imagineering R&D Inc.
Moving from a pure IK system to a fully torque-sensing system will allow for the platform to make on the fly adjustments that compensate for terrain or interaction with other performers or guests.
All of the work the team put into custom gearing, motors and actuation has paid off in spades with the ridiculously smooth and natural-looking movements of Kiwi’s arms and legs. Quick waves, shrugs, dance moves and even boxing jabs all look like a real — if slightly gentle — creature is performing them.
The team also demonstrated the custom-built performance software that they designed, which allows Kiwi to have different kinds of gaits with personality layered on top. The bottom layer is an IK-style gait system that keeps Kiwi upright and walking, but then layering the personalities on top adds character to the walk while still maintaining stability. Bouncy, jaunty walks, limps, sad or downhearted walks, all with the other motions of arms and head contributing to a constantly shifting center of mass and momentum. The paddling duck’s feet under the water is that gait system that takes the external inputs and integrates it into the walk naturally.
The current prototype software has a series of set behaviors, with a timeline that allows them to program new behaviors and actions by toggles or adjusting curves that control movement. With a series of tweaks in the software the changes become evident immediately, with Groot’s “mood” becoming immediately evident in his walk.
One moment he is bouncing along swinging his arms jauntily, clearly happy to be there. Then the next moment his arms are slumped, his head is hung and he is slowly plodding — clearly sad to be leaving the fun behind. It’s a remarkable bit of performance software.
And even though the expressive eyes are already impressive — the team is not done. Up next on the agenda is a sensory package that allows Kiwi to more fully understand the world around it and to identify people and their faces. This becomes important because eye contact is such an emotive and powerful tool to use in transporting a participant.
Even without the sensing software, I can tell you that the experience of this 2.5ft Groot locking eyes with me, smiling and waving was just incredibly transportive. Multiple times throughout my interaction I completely forgot that it was a robot at all.
Image Credits: Walt Disney Imagineering R&D Inc. / Walt Disney Imagineering R&D Inc.
As I mentioned at the top, the Project Kiwi platform still has a lot of work left to do before it makes any appearances in the parks. But it’s already well on the road to being viable for things like stage performances, photo ops and eventually free-roaming deployment in the parks.
That is really the vision. Snoddy says that the goal is to move the characters we love from across Disney’s pantheon into the spaces of the guests, elevating the entirety of the park to a live transportive experience, rather than a single ride or dark room. And to do it at the proper scale to make them genuine and capable of making guests believe. With these kinds of platforms, the possibilities are there to make the entire parks themselves a living, breathing home for the characters, rather than the tightly controlled environments of the rides themselves.
The arc of history in this Imagineering journey is drawn in robots. From Great Moments with Mr. Lincoln, to incredibly expressive characters like the Na’Vi Shaman anchored inside a dark ride, to characters that hold up in bright, well-lit spaces. Project Kiwi is the next frontier, allowing them to step off of the pedestal and right into the world of the guest.
One of the most fascinating fields in robotics currently is HRI, or human-robot interaction. This multidisciplinary effort to help humans and robots communicate better is often focused on safety and awareness in industrial settings. But I’ve long said that the most incredibly interesting work in this space is being done in Imagineering R&D. More than 100 million people pass through Disney’s parks per year, and the number of opportunities that they have to react to and interact with robotic characters grows yearly. And with projects like Kiwi on the horizon, this field is going to explode with new kinds of data and learnings.
And, of course, we’ll get to meet some of our favorite characters looking and acting as real as we’ve ever seen them in our world.
23/04/2021 01:57 PM



Galaxy A22 5G Renders Reveal The Phone In All Its Glory
23/04/2021 11:29 AM


Galaxy S21 FE Concept Shows A Realistic Design In Various Colors
23/04/2021 02:23 PM
Android 12 will make notifications on Wear OS smartwatches less annoying
23/04/2021 11:54 AM

Call Of Duty - Warzone Plunges Verdansk Into The 80s For Season 3
23/04/2021 08:10 PM

Tablet hardware has outpaced both software capabilities and usefulness
23/04/2021 11:30 AM
- Comics
- HEALTH
- Libraries & Demo
- Sports Games
- Racing
- Cards & Casino
- Media & Video
- Photography
- Transportation
- Arcade & Action
- Brain & Puzzle
- Social
- Communication
- Casual
- Personalization
- Tools
- Medical
- Weather
- Shopping
- Health & Fitness
- Productivity
- Books & Reference
- Finance
- Entertainment
- Business
- Sports
- Music & Audio
- News & Magazines
- Education
- Lifestyle
- Travel & Local
